Ein magnetischer Antrieb für Mikroroboter
Weiche Materialien, magnetisch verformbare Materialien als Motoren für winzige Schwimmkörper
Mikroroboter könnten einmal nach dem Vorbild von Spermien oder Pantoffeltierchen durch den menschlichen Körper schwimmen und dort medizinische Dienste verrichten. Forscher des Max-Planck-Instituts für Intelligente Systeme in Stuttgart haben dazu magnetisierbare Gummistreifen entwickelt, die im Magnetfeld die Schwimmbewegungen natürlicher Geißeln, Zilien oder Tentakeln imitieren. Über ein eigens entwickeltes Computerprogramm haben die Forscher dabei erstmals für jede Bewegungsform die jeweils optimalen magnetischen Rahmenbedingungen vorausberechnen können. Weitere Einsatzgebiete für das kontrollierte Verformen kleiner Bauteile sehen die Stuttgarter unter anderem in der Mikroverfahrenstechnik, bei der chemische und physikalische Prozesse in sehr kleinem Maßstab ausgeführt werden.
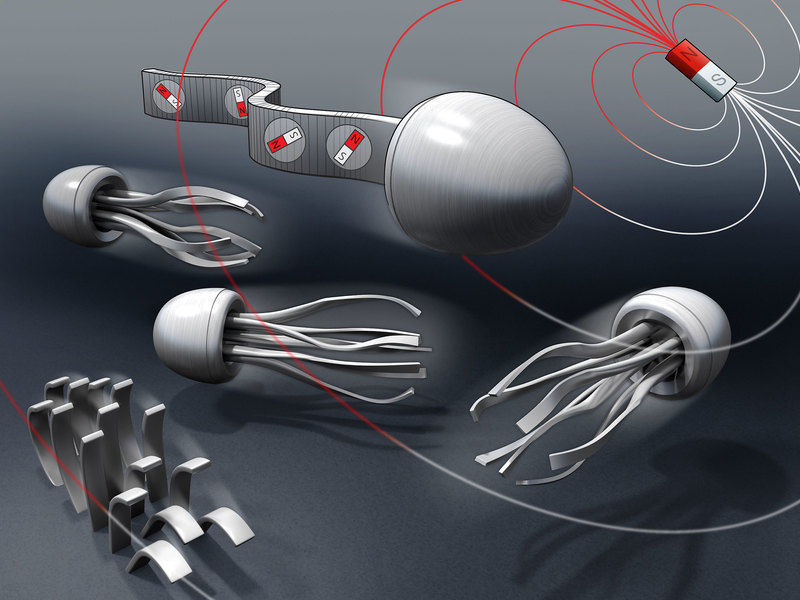
Magnetische Zilien und Tentakeln: Mit winzigen Silikonstreifen, die auf ausgeklügelte Weise mit magnetischen Partikeln versehen sind, lassen sich Roboter durch ein äußeres Magnetfeld fortbewegen wie Quallen, Bakterien oder Spermien
© Phil Loubere
Um voranzukommen, ist ein Spermium mit einem schwanzartigen Fortsatz ausgestattet. Diese Geißel wedelt unaufhörlich hin und her – und treibt die männliche Samenzelle so an. Forscher vom Stuttgarter Max-Planck-Institut für Intelligente System ermöglichen es nun, dass sich ein hauchdünner und nur wenige Millimeter langer Streifen aus Silikongummi nach einem ganz ähnlichen Muster bewegt. Dazu mischten sie dem elastischen Gummi Partikel einer magnetisierbaren Neodym-Eisen-Bor-Verbindung bei. Über ein von außen angelegtes Magnetfeld konnten sie danach die Form des Gummistreifens gezielt variieren – und diesen zum wellenförmigen hin und her Schlagen bringen.
Auf ganz ähnliche Weise gelang es den Wissenschaftlern auch, die komplexe Ruderbewegung einer Zilie zu imitieren. Zilien sind extrem feine Härchen, die sich beispielsweise auf der Oberfläche von Pantoffeltierchen befinden – und diese mit ihren hochkomplexen Ruderschlägen antreiben. Außerdem bauten die Forscher noch eine Art künstliche Qualle mit zwei Silikontentakeln. Auch diese Gummitentakel ließen sie per Magnetfeld ruderartige Schwimmbewegungen ausführen. Mikroroboter durch solche magnetisierten künstlichen Zilien und Tentakeln gewissermaßen indirekt anzutreiben ist effektiver als winzige Schwimmkörper mit magnetischen Partikeln zu versehen und mit einem äußeren Magnetfeld direkt durch eine Flüssigkeit zu bewegen, wie Materialwissenschaftler festgestellt haben.
Dichte und Ausrichtung der magnetischen Partikel werden variiert
Damit die Bewegungsabläufe der biologischen Vorbilder auch bei einem künstlichen Schwimmkörper funktionieren, war das Zusammenspiel mit dem äußeren Magnetfeld: Die einzelnen Bereiche der Gummistreifen müssen darauf unterschiedlich reagieren. Manche Zonen müssen angezogen, andere abgestoßen werden. Andernfalls könnten sich die Streifen zum Beispiel nicht zu einer Welle verformen oder an einem ihrer Enden ansatzweise aufrollen lassen.
Um die verschiedenen Bewegungen zu ermöglichen, nutzten die Forscher zwei Stellschrauben. „Zum einen haben wir die Dichte der magnetisierbaren Partikel entlang des Silikonstreifens variiert und zum anderen die magnetische Ausrichtung dieser Partikel“, erklärt Guo Zhan Lum, Wissenschaftler in der Abteilung „Physische Intelligenz“ am Stuttgarter Max-Planck-Institut. Die lokale Konzentration der Partikel steuerten die Forscher direkt über den Herstellprozess. Um den magnetischen Dipolen der Teilchen die gewünschte Ausrichtung zu geben, setzten sie das gesamte Gummi anschließend einem starken Magnetfeld aus.
Gezielte Verformungen steuern die Ausrichtung magnetischen Dipole
Da sich in einem gleichförmigen Magnetfeld alle Teilchen gleich orientieren, womit beim flachen Gummistreifen nichts gewonnen gewesen wäre, wandten die Wissenschaftler noch einen Trick an: „Indem wir den Gummistreifen zunächst gezielt verformt haben, konnten wir die endgültige Ausrichtung der einzelnen magnetischen Dipole sehr genau steuern“, erklärt Lum. Zwar richteten sich auch jetzt alle magnetischen Dipole im Magnetfeld parallel aus. Brachte man das Gummi danach aber wieder in die flache Ausgangsform, wiesen diese Dipole entlang des Gummistreifens jeweils in die für die spätere Bewegungsform benötigte Richtung.
Von da an arbeiteten die Forscher mit einem schwächeren Magnetfeld weiter, das die Orientierung der magnetisierten Partikel nicht mehr veränderte. In diesem Feld wurden nun manche Bereiche entlang eines Gummistreifens angezogen, andere abgestoßen – und das Gummi verformte sich entsprechend. Indem sie die Stärke und Richtung des Feldes mit der Zeit variierten, ließen die Forscher die Streifen die jeweiligen komplexen Bewegungszyklen durchlaufen.
Anwendungen im Mini-Transportwesen und in der Mikroverfahrenstechnik
„Ein wesentlicher Erfolg unserer Arbeit besteht darin, dass wir für ein gewünschtes Bewegungsmuster die jeweils optimale Magnetisierung sowie die optimalen Eigenschaften des Magnetfelds berechnen können“, sagt Metin Sitti, Direktor am Max-Planck-Institut für Intelligente Systeme. Zu diesem Zweck haben er und seine Mitarbeiter aus der Gruppe „Physische Intelligenz“ den Bewegungsmechanismus mit einem mathematischen Modell beschrieben und ein entsprechendes Computerprogramm entwickelt. Eine Weltpremiere. Bis dahin waren Wissenschaftler auf Intuition und Abschätzungen angewiesen, um die magnetischen Rahmenbedingungen festzulegen.
Weiche Materialien wie Silikongummi gezielt und reversibel zu verformen, könnte aus Sicht der Stuttgarter Wissenschaftler für eine Reihe von Einsatzgebieten interessant sein. Metin Sitti kann sich vorstellen, dass etwa die genannten Schwimmbewegungen eines Tages zum Beispiel Anwendungen in der Medizin erlauben. So ließen sich eventuell Mikroroboter per Magnetfeld so dirigieren, dass sie Wirkstoffmoleküle oder medizinisches Gerät an einen gewünschten Ort im Körper bringen.
Die Forscher sehen aber nicht nur Einsatzmöglichkeiten im Mini-Transportwesen. Dass sich die Form von Materialien in Sekundenbruchteilen per Magnetfeld kontrolliert regulieren lässt, könne überall dort zum Einsatz kommen, wo auf kleinem Raum etwas geschaltet oder mechanisch angesteuert werden muss. Auch in der Mikroverfahrenstechnik könne die Technik zum Tragen kommen. Zum Beispiel bei der Steuerung von Mikropumpen, wie sie für Lab-on-a-Chip-Technologien benötigt werden. „Wir hoffen, dass das programmierbare Verformen weicher Materialien Forscher in vielen Bereichen zu einem breiten Spektrum möglicher Anwendungen inspiriert“, sagt Metin Sitti.
Originalveröffentlichung

Weitere News aus dem Ressort Wissenschaft





















Meistgelesene News











Weitere News von unseren anderen Portalen






























Zuletzt betrachtete Inhalte

Die Dichte ist entscheidend für eine bessere Leistung des Batteriematerials - Ist das der Schlüssel zu einer besseren elektrochemischen Leistung?