Neue Herangehensweise bei sich selbstmontierenden Mikromaschinen
Einen Roboter mit vielen verschiedenen Komponenten zu bauen, ist eine anspruchsvolle Aufgabe. Noch mehr, wenn man an einem nur wenige Mikrometer kleinen Roboter tüftelt. Da ist es praktisch, wenn sich die Teile selbst zusammenbauen.
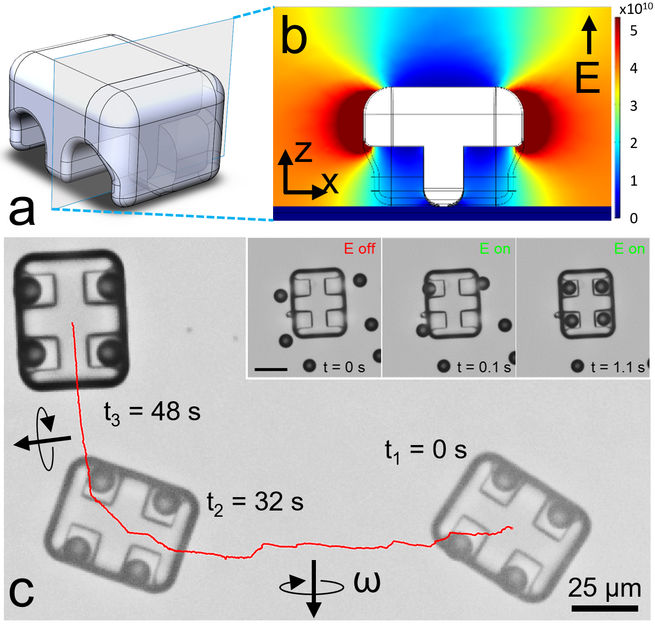
Zusammenbau eines Mikroautos in einem inhomogenen elektrischen Feld
MPI-IS
Die Selbstkonfigurierung der Komponenten sogenannter Mikromaschinen ist nichts Neues; diese Methode wenden Forscher seit Jahrzehnten an. Magnetische Partikel, die unter rotierenden Magnetfeldern interagieren, bauen sich selbst zusammen, ebenso wie Komponenten, die durch chemische Reaktionen aneinander andocken. Ein Beispiel dafür sind bakterielle Mikroschwimmer. Das Endergebnis dieser selbst montierten Mikromaschinen ist jedoch sehr begrenzt – bis heute.
Wissenschaftler des Max-Planck-Instituts für Intelligente Systeme in Stuttgart (MPI-IS) wagten eine neue Herangehensweise, um nicht nur eine, sondern viele unterschiedlich geformte Maschinen zwischen 40 und 50 Mikrometern klein. Diese Mikromaschinen sind etwa halb so groß wie der Durchmesser eines menschlichen Haares – und bauen sich selbst zusammen. Sie zeigten in ihrer Forschungsarbeit, dass eine programmierbare Selbstmontage ihrer Mikromaschinen allein durch das Design und die Struktur der einzelnen Komponenten möglich ist: durch die Nutzung dielektrophoretischer Kräfte, die sich in einem inhomogenen elektrischen Feld um die einzelnen Teile herum bilden. In dieser Umgebung können das Maschinengerüst, das größte Bauteil, und die magnetischen Einzelteile kontrolliert zusammengesetzt werden. Die bahnbrechende Forschungsarbeit der Stuttgarter Wissenschaftler wurde am 24. Juni 2019 im Fachjournal Nature Materials unter dem Titel Shape-encoded dynamic assembly of mobile micromachines veröffentlicht. Berk Yigit, Doktorand in der Abteilung für Physische Intelligenz am MPI-IS, und Yunus Alapan, ein Postdoc und Maschinenbauingenieur aus der gleichen Abteilung, sind beide Hauptautoren der oben genannten Publikation. Metin Sitti, Direktor am MPI-IS und Leiter der Abteilung für Physische Intelligenz, ist Letztautor.
„Wir nutzen die form- und materialspezifischen Kräfte in einem inhomogenen elektrischen Feld", erklärt Alapan. „Die Form des Maschinengerüsts oder -rahmens einerseits und der kleineren Komponenten andererseits beeinflussen die umliegenden Gradienten. Diese entwickeln eine Anziehungskraft zwischen den Einheiten. Mit dieser Kraft lassen sich dann Mikromaschine zusammensetzen. Wenn wir die Form der Komponenten ändern, steuern wir, wie diese Gradienten erzeugt werden und damit, wie die Komponenten sich gegenseitig anziehen."
„Die Komponenten unserer Mikromaschinen sind übrigens nicht fest zusammengebaut", fügt Yigit hinzu. „Sie können sich relativ zueinander bewegen, was eine noch komplexere Fortbewegung ermöglicht. Stellen Sie sich vor, die Räder eines Autos drehen sich, aber das Fahrgestell bleibt unverändert: Das Auto in seiner Gesamtheit bewegt sich vorwärts und kann in viele Richtungen fahren. Anstatt starre Verbindungen herzustellen, kann sich jedes Teil einzeln bewegen."
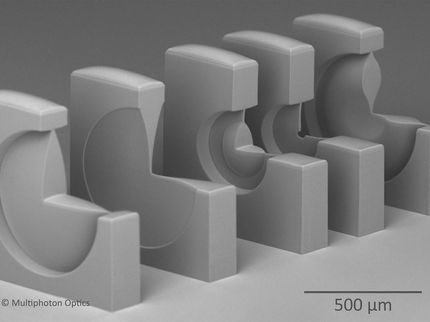
Die Herstellung der einzelnen Komponenten erfolgte durch ein spezielles 3D-Druckverfahren mit Zwei-Photonen-Lithographie. „Unser erstes Design war ein Mikroauto, eine Hommage an die Allgegenwärtigkeit des Radantriebs in unserem Leben", sagt Alapan. „Wir haben das 3D-Chassis mit seinen Radtaschen ausgewählt, da diese Struktur ideale Anziehungskräfte entwickelt, um die magnetischen Räder anzuziehen. Innerhalb weniger Sekunden, nachdem wir das elektrische Spannungsfeld angeschaltet haben, zog es die Räder in die Radtaschen!" Anschließend steuerten die Forscher das Mikrofahrzeug durch ein vertikal drehendes Magnetfeld, wie hier zu sehen ist.
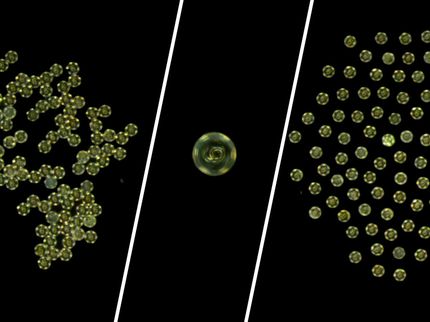
Alapan und Yigit probierten viele verschiedene Bauteilgrößen und -formen aus, ihre winzigen, selbst-montierenden Roboter gibt es in vielen Varianten: Den Forschern gelang es wie oben erwähnt ein Mikroauto zu bauen, und sogar etwas, das einer kleinen Rakete und einer Mikropumpe ähnelt. Während die Pumpe dreht, werden magnetische Partikel entlang ihrer Spirale nach oben bewegt. Dies führt zu einem Pumpeffekt, wenn sich eine Mikropumpe in der Nähe einer anderen befindet. Die Forscher zeigten weiter, dass sie nicht nur einzelne Mikroroboter bauen können, sondern gleich mehrere Mikroroboter zusammensetzen können. Das ebnet den Weg für hierarchisch strukturierte Multi-Roboter-Baugruppen.
Die Möglichkeit, sich auf viele verschiedene Arten bewegen zu können, ist von großem Vorteil: Es könnte der entscheidende Faktor sein, ob solche Mikromaschinen eines Tages im Körper als Medikamenten-Lieferanten eingesetzt werden können, oder Tumorzellen aufspüren. Sich vielseitig fortbewegen zu können, ist in solch unwägbarem Terrain äußerst wichtig.
Bei einem sind sich die Forscher sicher: Die oben genannte Methode der Selbstmontage, um Mikromaschinen in vielen verschiedenen Formen und Größen bauen zu können, wird einen großen Einfluss auf die Wissenschaft haben. „Mikromaschinen, die vielfältig mobil sind, eines Tages gezielt in vitro Medikamente verabreichen können, die einzelne Zellen manipulieren können – der Bau solcher Maschinen dieser Größenordnung ist eine große Herausforderung. Unser neuer Ansatz könnte die Komplexität dieser Aufgaben reduzieren", sagt Sitti.
Originalveröffentlichung
Weitere News aus dem Ressort Wissenschaft





























































